“`html
Mars yüzeyinde hareket etmek dışarıdan bakıldığında oldukça basit bir sürüş gibi görünse de, arka planda karmaşık bir planlama süreci yer almaktadır. NASA, Aralık 2025’te bu sürecin önemli ölçüde değiştirecek bir adım atarak, Mars’taki Jezero Krateri içinde görevli Perseverance gezgin aracı için rotasını büyük bir dil modeli kullanarak belirledi.
Bu projede NASA, Anthropic tarafından geliştirilen Claude yapay zeka modelini kullanarak Perseverance için detaylı bir sürüş planı oluşturdu.
8-10 Aralık tarihleri arasında araç, Mars yüzeyinde yaklaşık 400 metre mesafe alarak, bu mesafeyi tamamen Claude’un belirlediği rota üzerinden kat etti. Belirlenen rota, yoğun kayalık bölgeyi kapsamaktadır ve bu alan genellikle insan planlaması için ciddi zaman gerektirir.
Kritik olan, yapay zekanın aracı doğrudan kontrol etmemesidir. Claude, yalnızca sürüş için gerekli rota noktalarını belirlemiş ve bu noktalar daha sonra NASA mühendisleri tarafından incelenmiştir.
Yani Perseverance, kesin komutlarını yine Dünya’dan alırken, bu komutların temelini yapay zekanın önerdiği bir plan oluşturmuş oluyordu.
Mars’ta bir gezgin aracı yönlendirmek, dışarıdan görüldüğü kadar basit değildir. Küçük bir eğim, gevşek yüzey veya keskin bir kaya parçası, aracın kaymasına veya tekerleklerin boş dönmesine yol açabilir. Bu nedenle NASA’, Perseverance’ın inişinden bu yana her sürüşü ayrıntılı planlarla gerçekleştirmektedir.
NASA, Mars’ta rota planlamasını yapay zekaya devretti
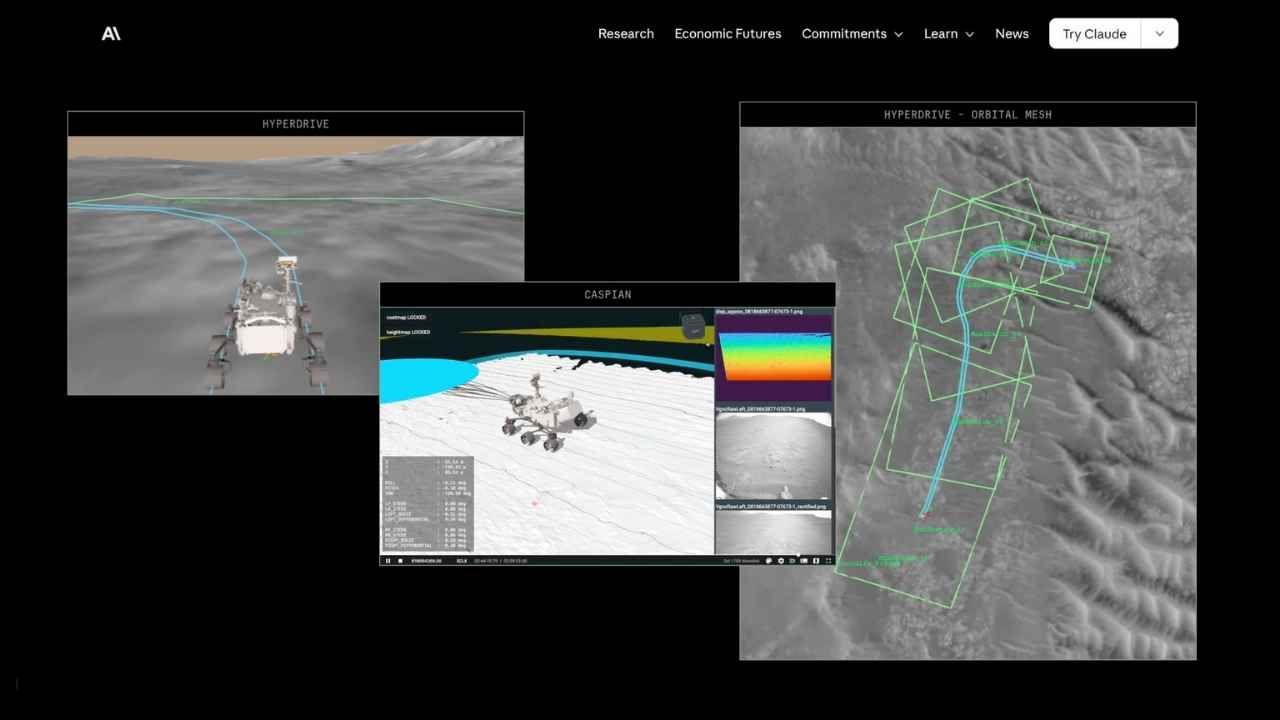
Claude’un bu görevi gerçekleştirebilmesi için NASA, araca daha önce toplanan görüntüleri ve haritalarını sağlamıştır. Ardından Claude, onar metrelik segmentler halinde rota noktaları oluşturmuş, bunları kendi içinde değerlendirerek gerektiğinde yeniden düzenlemiştir.
Bu süreç, tek bir komut yerine adım adım ilerleyen sistemli bir planlama modeli olarak sürdürülmüştür. Oluşan rota, Jet Propulsion Laboratory (JPL) mühendisleri tarafından simülasyon ortamında test edilmiş, ekipler Claude’un önerdiği plan üzerinde küçük düzeltmeler yapmıştır.
Bu düzeltmelerin bazıları, Claude’un doğrulayamadığı daha yakın alanlardan alınmış güncel görüntülere dayanmaktadır. Nihai rota, tüm bu kontroller tamamlandıktan sonra Perseverance’a iletildi.
NASA’nın bu yaklaşım, rota planlama süresini önemli ölçüde kısaltma potansiyeline sahiptir. Daha hızlı planlama, mühendislerin daha fazla keşif yapmasına olanak tanımakta; bu da Perseverance’ın daha fazla örnek toplayarak daha geniş alanları incelemesine yardımcı olmaktadır.
Bu durum, NASA için mevcut zorluklar göz önüne alındığında büyük önem taşıyor. Ajans, son zamanlarda önemli personel kayıpları yaşamış ve bilim bütçesi üzerindeki baskılar devam etmektedir. Daha az insan kaynağıyla daha fazla görev yürütme ihtiyacı, otomasyonun ve yapay zekanın kullanımını kaçınılmaz hale getirmektedir.
Anthropic açısından bakıldığında, bu çalışma Claude’un yeteneklerini gerçek dünya koşullarında gösteren önemli bir örnek sunmaktadır. Kısa süre önce basit oyun senaryolarında güçlük çeken bir modelin, Mars yüzeyinde güvenli bir rota planlayabilmesi, büyük dil modellerinin gelişim hızını gözler önüne sermektedir.
NASA, gelecekte yapay zeka destekli otonom sistemlerin yalnızca Mars’ta değil, Güneş Sistemi’nin uzak bölgelerinde de görev yapmasını planlıyor. Bu yöntem, insan müdahalesinin gecikmeli veya sınırlı olduğu görevlerde keşif kapasitesini artıracak bir unsur olarak değerlendiriliyor.
“`


